I am currently looking for a internship opportunity from Jun'25 to Aug'26 (3 full months)!
About Me
Hello! I'm Celeste, a Year 3 Computer Engineering student at the National University of Singapore (NUS), graduating in 2027 with a B.Eng and continuing on to a Master's in 2028.
I started coding and tinkering with robotics from a young age, from early robotics projects, to robotics clubs, and eventually representing Singapore at international competitions. Over time, I’ve developed a passion for building reliable systems that bridge software, hardware, and real-world applications. Click here for more information.
At NUS, I have worked extensively on autonomous robotic systems across underwater and aerial platforms. I contributed to the development of an autonomous MiniAUV that competed at RoboSub 2025, and I am currently working on an undergraduate research project to build a fully autonomous drone for SAFMC 2026.
Beyond system integration, I enjoy working close to the hardware. I designed and built a custom Electronic Speed Controller (ESC), handling power electronics design, PCB layout, motor control logic, and embedded firmware development. From low-level motor commutation to high-level autonomy, I enjoy engineering systems end-to-end — especially where control theory, embedded systems, and intelligent software intersect.
I am looking to work in fast-paced, collaborative environments and enjoy tackling problems that challenge me to design and build across every layer of a system.

Education
National University of Singapore
B.Eng in Computer Engineering
M.Eng (2027-2028)
NUS E-Scholars
Team Bumblebee
Lab Assistant for EE2026 Digital Design
Lab Assistant for EG1311 Design & Make
4.80 GPA
Hardware, Systems & Signals
- CG1111A Engineering Principles & Practices I
- CG2111A Engineering Principles & Practices II
- EE2026 Digital Design
- CG2271 Real-Time Operating Systems
- CG2027 Transistor-level Digital Circuits
- CG2028 Computer Organisation
- CG3207 Computer Architecture
- CG2023 Signals & Systems
Software, Algorithms & Intelligence
- CS2040C Data Structures and Algorithms
- EE2211 Introduction to Machine Learning
- MA1508E Linear Algebra for Engineering
- CS2113 Software Engineering & Object-Oriented Programming
Raffles Institution (Junior College)
Automatica Club (Robotics)
Audio-Visual Club
VIAWiki Tech Lead
Intern at DSO
CSIT Computing Scholarship
Computing, Math, Physics, Econs
88.75RP
- Digigirlz Champion
Raffles Girls' School (Secondary)
Infocomm Club Exco
Projects
Robotics Projects

MiniAUV
An autonomous underwater vehicle designed for complex underwater tasks for the RoboSub Competition.
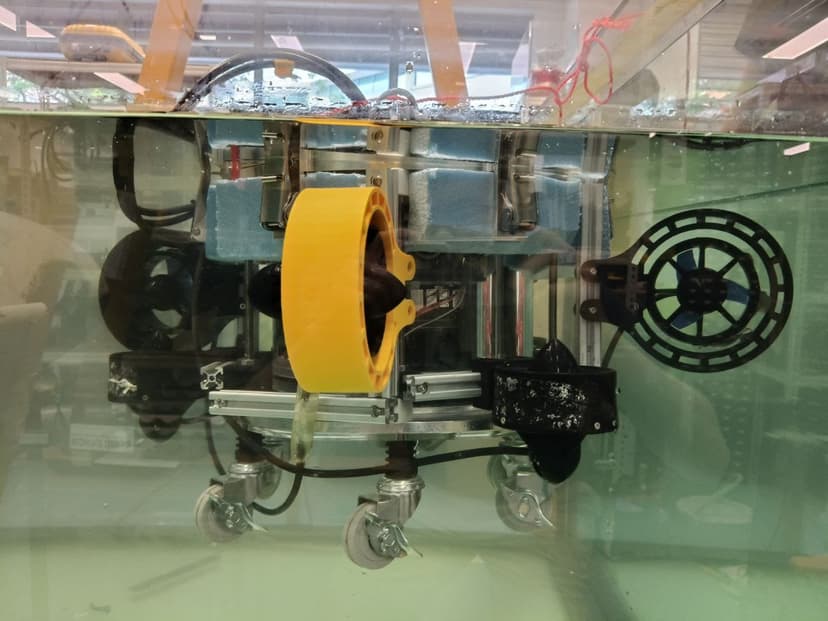
HornetX AUV
An autonomous underwater vehicle designed for complex underwater tasks.
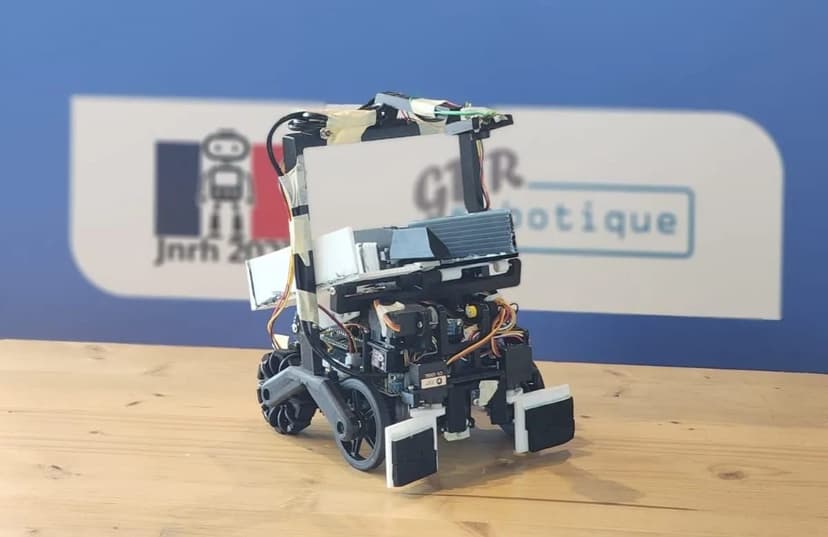
RoboCup Rescue Robot
A robot made to navigate a line and obstacle track, to simulate search and rescue operations.
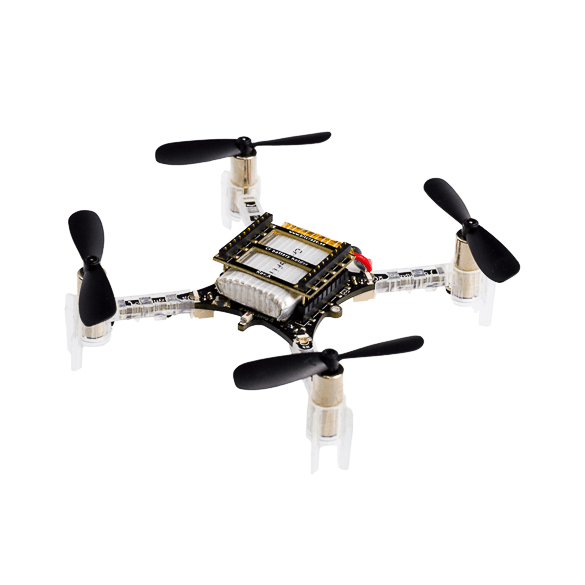
SAFMC (Cat E) Swarm Drones
An autonomous swarm of drones detect and rescue victims in an unknown search area.
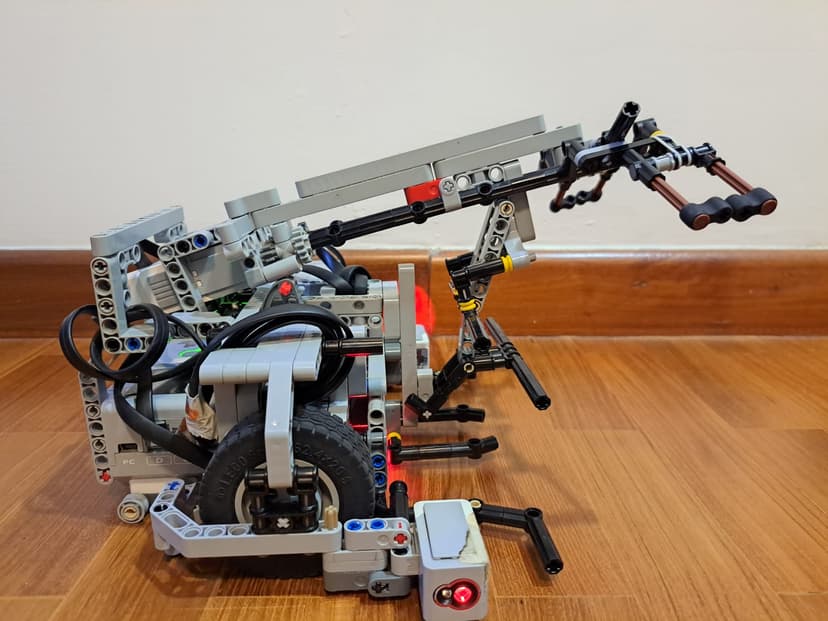
World Robotics Olympiad (& NRC) Robot
A robot made to complete specific tasks in a standard platform (Lego) competition setting.
Electrical and Computer Engineering Projects
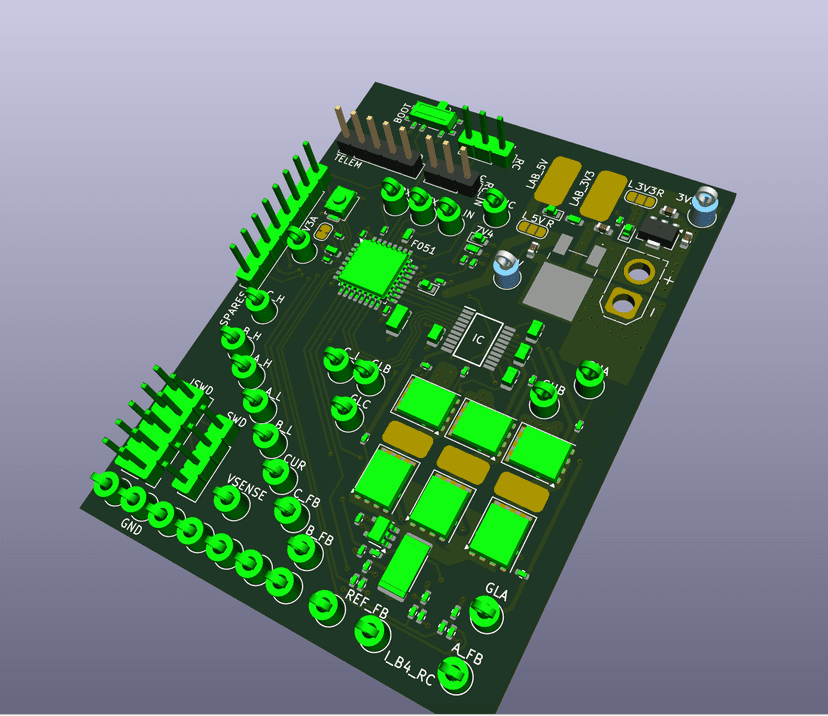
Custom Brushless ESC
A discrete three-phase brushless motor controller designed for micro-air vehicles, implementing sensorless back-EMF commutation with AM32 firmware on STM32.
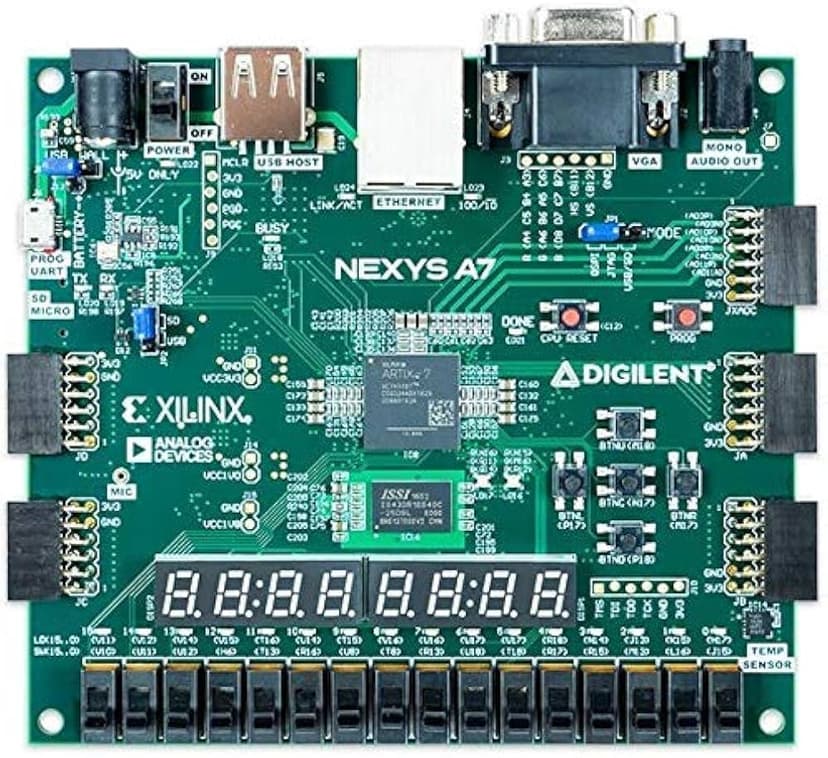
CG3207: RISC-V CPU on FPGA
A 5-stage pipelined RISC-V CPU with hazard detection, forwarding, and 2-bit dynamic branch prediction implemented in Verilog on a Nexys 4 FPGA.

EE2026: FPGA Project
4 player fighting game with a keyboard controls and monitor and speaker output, implemented on 2 FPGA boards.

Reflectarray Antenna Design
The reflectarray was created using our rectangular phoenix cell design. Done as part of a DSO internship (YDSP Programme)
Software Engineering Projects
VIAWiki
A centralised database of Singapore student-led service projects.
Dungeon Duality
A 2-player Dungeon Crawler Co-op game, made during the NUS Orbital Programme.
Operation Einstein's App
Operation Einstein is a non profit organisation that seeks to educate young children in STEM through different teaching methods.
CS2113: Espresso
A CLI app to help you manage your tasks and deadlines.
Skills
Technical Skills
- Verilog
- VHDL
- Python
- C/C++/C#
- JavaScript/TypeScript
- Java
- React
- Next.js
- Node.js
- RISC-V Assembly
- ARM Assembly
- Bare Metal Programming
- Embedded Systems
- PCB Design
- Signal Analysis
- MATLAB
- OpenCV
- ROS
- Machine Learning
- Git
- Swift
- Soldering & Circuit Prototyping
- Cocotb
Familiar Platforms
- Linux
- Fusion 360
- SolidWorks
- EasyEDA
- KiCad
- Figma
- Jupyter Notebook
- IntelliJ IDEA
- VS Code
- XCode
- GitHub
- Notion
- Trello
- AWS
- Vivado
- MCUXpresso IDE
- STM32CubeIDE
- STM32CubeProgrammer
- PlatformIO
- Microcontrollers (Arduino, STM32, ESP32, RPi Pico)